Project information
- Category: Sustainability Research Station
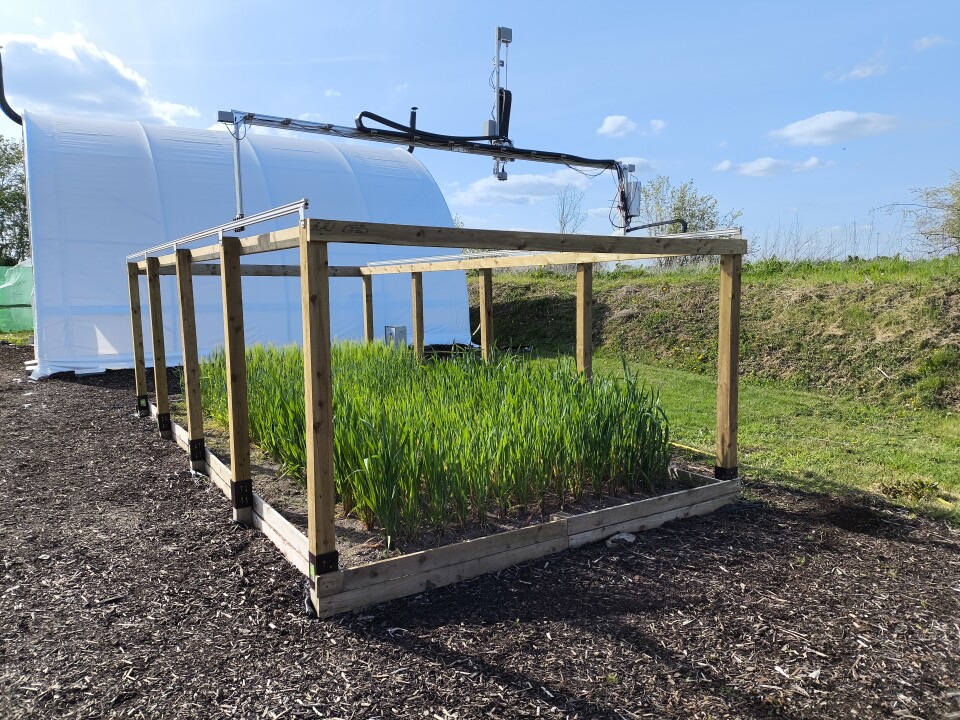
This experiment serves as a prototyping platform for the Callan robot's imaging system by simulating a traditional cereal farm at small scale and exposing the system to real-world field phenotyping challenges—lighting variability, wind, neighboring plant occlusion, rain, temperature swings, weeds, and pests. A custom multispectral camera was mounted on a FarmBot raised to a 2 m height to clear the oat canopy and mirror Callan’s perspective. Over the month leading up to harvest, we collected a time series of images while simultaneously acquiring ground-truth physiological data with the LI-COR LI-600, the gold standard in field plant health measurement; its use is accurate but expensive and labor-intensive. Our goal is to train end-to-end deep learning models to predict LI-COR measurements from multispectral imagery, providing scalable proxies for key indicators of plant health.